
My Projects
Explore some of the projects I’ve worked on. Click any project for more details.
4D Perception
In this project, I learned how to do 3D object detection, tracking, and visualization using LiDAR and camera data.
Visual Fusion

Early and late fusion techniques to combine LiDAR point clouds and camera images for obstacle detection.
Bird’s Eye View Perception
This repository contains my work on Bird’s Eye View (BEV) transformation using both classical and deep learning methods.
Deep Learning on Point Clouds
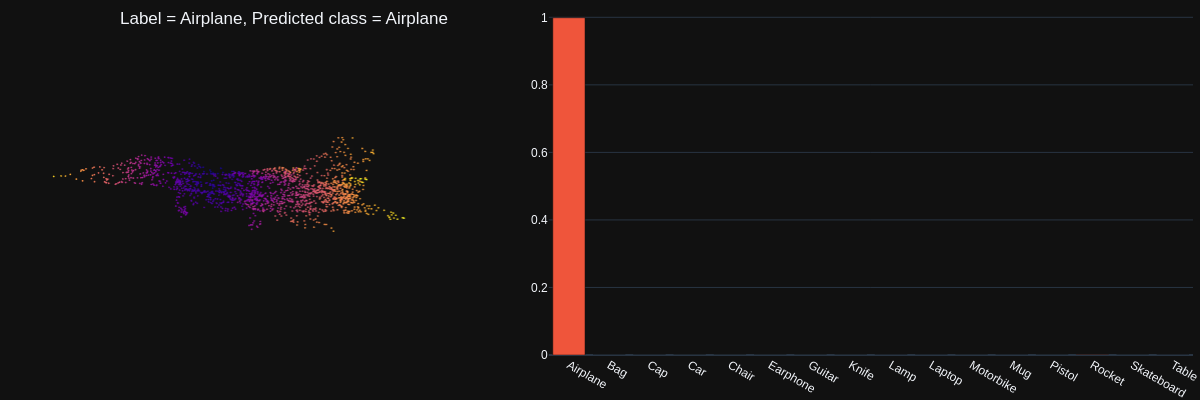
End-to-End implementation of deep learning architectures for 3D point cloud understanding.
Built and trained PointNet and a Voxel-Based 3D CNN from scratch using the ShapeNet Core dataset — covering everything from data preprocessing to model visualization.
Point Cloud Perception
This project demonstrates how to process, segment, and transform raw LiDAR data into meaningful 3D scene understanding for autonomous driving tasks.
Stereo Depth Estimation
This project explores stereo vision techniques for depth estimation. It covers camera calibration, disparity map generation, depth map computation, and obstacle detection in 3D from stereo images.